pid控制系统设计,原理、应用与实现
时间:2024-10-04 来源:网络 人气:
PID控制系统设计:原理、应用与实现

随着工业自动化程度的不断提高,PID(比例-积分-微分)控制系统因其简单、可靠、易于实现等优点,被广泛应用于各个领域。本文将详细介绍PID控制系统的设计原理、应用场景以及实现方法。
一、PID控制系统的设计原理
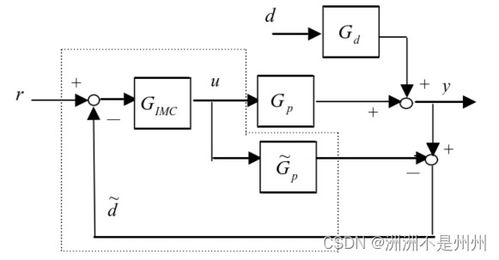
PID控制系统是一种经典的反馈控制系统,它通过调整控制器的比例、积分和微分参数,实现对被控对象的精确控制。PID控制器的输出信号由以下公式给出:
u(t) = Kp e(t) + Ki ∫e(t)dt + Kd de(t)/dt

其中,u(t)为控制器输出信号,e(t)为设定值与实际值之间的误差,Kp、Ki、Kd分别为比例、积分和微分系数。
1. 比例环节(P):比例环节的输出与误差成正比,其作用是快速减小误差。比例系数Kp越大,系统响应速度越快,但过大的Kp会导致系统振荡。
2. 积分环节(I):积分环节的输出与误差的积分成正比,其作用是消除稳态误差。积分系数Ki越大,系统稳态误差越小,但过大的Ki会导致系统响应速度变慢。
3. 微分环节(D):微分环节的输出与误差的微分成正比,其作用是预测误差的变化趋势,从而提前调整控制器的输出。微分系数Kd越大,系统对误差变化的响应越敏感,但过大的Kd会导致系统响应过激。
二、PID控制系统的应用场景
PID控制系统广泛应用于以下领域:
1. 工业自动化:如电机控制、压力控制、流量控制等。
2. 机器人控制:如行走控制、抓取控制等。
3. 医疗设备:如呼吸机、血液透析机等。
4. 交通运输:如汽车防抱死制动系统、飞机自动驾驶系统等。
5. 电力系统:如发电机组控制、电力负荷控制等。
三、PID控制系统的实现方法
PID控制系统的实现方法主要包括以下几种:
1. 硬件实现:使用模拟PID控制器或数字PID控制器。模拟PID控制器采用运算放大器等模拟电路实现,而数字PID控制器则采用单片机或DSP等数字电路实现。
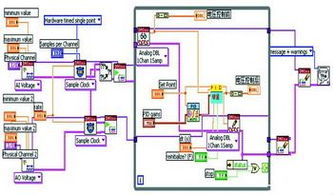
2. 软件实现:在计算机或嵌入式系统中,通过编程实现PID控制算法。常用的编程语言有C、C++、Python等。
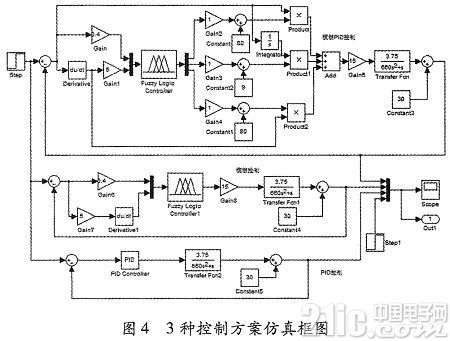
3. 仿真实现:使用仿真软件(如MATLAB、Simulink等)对PID控制系统进行仿真,以验证其性能和稳定性。
四、PID控制系统的设计步骤

1. 确定控制目标:根据实际需求,确定被控对象的控制目标,如温度、压力、速度等。
2. 选择控制器类型:根据被控对象的特性和控制目标,选择合适的控制器类型,如PID控制器、模糊控制器等。
3. 设计控制器参数:根据被控对象的数学模型和控制目标,设计PID控制器的参数,如Kp、Ki、Kd等。
4. 系统仿真与调试:使用仿真软件对PID控制系统进行仿真,验证其性能和稳定性,并根据仿真结果调整控制器参数。
5. 系统实现与测试:将PID控制系统应用于实际场景,进行测试和优化,确保其满足控制目标。
PID控制系统是一种简单、可靠、易于实现的控制系统,在各个领域都有广泛的应用。本文详细介绍了PID控制系统的设计原理、应用场景、实现方法以及设计步骤,为读者提供了有益的参考。
相关推荐




教程资讯
教程资讯排行