
can总线系统设计,原理、应用与挑战
时间:2024-11-07 来源:网络 人气:
CAN总线系统设计:原理、应用与挑战

随着工业自动化和汽车电子技术的快速发展,CAN(Controller Area Network)总线作为一种高性能的串行通信网络,已经在各个领域得到了广泛应用。本文将详细介绍CAN总线系统的设计原理、应用场景以及面临的挑战。
一、CAN总线系统设计原理
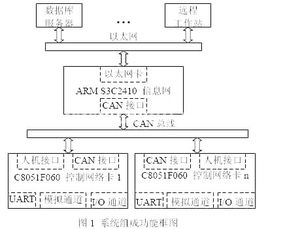
CAN总线系统是一种多主站、多节点、差分传输的通信网络。其设计原理主要包括以下几个方面:
多主站通信:CAN总线上的每个节点都可以主动发送数据,不受主从节点的限制,提高了通信的灵活性和实时性。
差分传输:CAN总线采用差分传输方式,可以有效抑制电磁干扰,提高通信的稳定性和抗干扰能力。
非破坏性仲裁:当多个节点同时发送数据时,CAN总线采用非破坏性仲裁机制,确保优先级高的节点优先发送数据,避免数据冲突。
数据帧结构:CAN总线数据帧包括标识符、数据长度码、数据、CRC校验和帧结束等字段,保证了数据的完整性和可靠性。
二、CAN总线系统应用场景
CAN总线系统具有高性能、高可靠性、低成本等优点,广泛应用于以下场景:
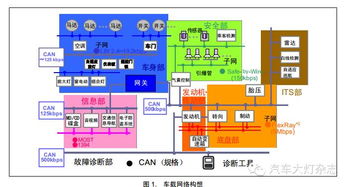
汽车电子:CAN总线在汽车电子领域得到了广泛应用,如发动机控制、车身控制、安全气囊、ABS等。
工业自动化:CAN总线在工业自动化领域得到了广泛应用,如机器人控制、生产线控制、传感器网络等。
医疗设备:CAN总线在医疗设备领域得到了广泛应用,如监护仪、手术机器人、医疗设备控制等。
智能家居:CAN总线在智能家居领域得到了广泛应用,如智能家电控制、家庭安全监控等。
三、CAN总线系统设计挑战

尽管CAN总线系统具有许多优点,但在实际应用中仍面临以下挑战:
高速率通信:随着工业自动化和汽车电子技术的发展,对CAN总线系统的通信速率提出了更高的要求,需要设计更高性能的CAN控制器和传输介质。
电磁兼容性:CAN总线系统在复杂电磁环境下容易受到干扰,需要采取有效的抗干扰措施,如滤波、屏蔽、接地等。
网络拓扑结构:CAN总线系统的网络拓扑结构对通信性能有很大影响,需要根据实际应用需求选择合适的拓扑结构。
系统可靠性:CAN总线系统需要保证在恶劣环境下仍能稳定运行,需要设计冗余机制和故障检测与隔离机制。
CAN总线系统作为一种高性能的串行通信网络,在各个领域得到了广泛应用。在设计CAN总线系统时,需要充分考虑其原理、应用场景和挑战,以确保系统的性能和可靠性。随着技术的不断发展,CAN总线系统将在更多领域发挥重要作用。
相关推荐




教程资讯
教程资讯排行









