
agv的控制系统,AGV控制系统的设计与实现
时间:2024-11-09 来源:网络 人气:
AGV控制系统的设计与实现

随着工业自动化和智能化水平的不断提高,自动引导车(AGV)作为现代物流系统中不可或缺的设备,其控制系统的研究与开发显得尤为重要。本文将详细介绍AGV控制系统的设计与实现,旨在为相关领域的研究者和工程师提供参考。
AGV控制系统是AGV的核心部分,主要负责AGV的路径规划、运动控制、任务调度等功能。一个高效、稳定的AGV控制系统对于提高物流效率、降低人工成本具有重要意义。本文将从系统架构、硬件设计、软件设计等方面对AGV控制系统进行详细介绍。
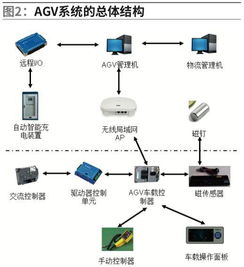
二、AGV控制系统架构

AGV控制系统通常采用分层架构,主要包括以下层次:
感知层:负责采集AGV周围环境信息,如传感器、摄像头等。
网络层:负责数据传输,包括无线通信、有线通信等。
控制层:负责AGV的运动控制、路径规划、任务调度等功能。
应用层:负责AGV的具体应用,如货物搬运、生产线物流等。
各层次之间通过通信协议进行数据交互,共同完成AGV的运行任务。
三、硬件设计
AGV控制系统的硬件设计主要包括以下部分:
控制器:负责AGV的控制逻辑,通常采用嵌入式处理器或工业控制计算机。
传感器:用于感知AGV周围环境,如激光雷达、摄像头、超声波传感器等。
执行器:负责AGV的运动控制,如电机驱动器、转向器等。
通信模块:负责AGV与其他设备之间的数据传输,如无线通信模块、有线通信模块等。
硬件设计应考虑以下因素:
可靠性:确保AGV在恶劣环境下稳定运行。
实时性:满足AGV实时控制需求。
可扩展性:方便后续功能扩展。
四、软件设计

AGV控制系统的软件设计主要包括以下部分:
运动控制算法:实现AGV的路径规划、速度控制等功能。
路径规划算法:根据AGV周围环境信息,规划AGV的行驶路径。
任务调度算法:根据任务需求,合理分配AGV资源。
通信协议:实现AGV与其他设备之间的数据传输。
软件设计应考虑以下因素:
模块化:提高代码可读性和可维护性。
实时性:满足AGV实时控制需求。
安全性:确保AGV在运行过程中不会对周围环境造成危害。
AGV控制系统是AGV的核心部分,其设计与实现对于提高物流效率、降低人工成本具有重要意义。本文从系统架构、硬件设计、软件设计等方面对AGV控制系统进行了详细介绍,为相关领域的研究者和工程师提供了参考。
相关推荐




教程资讯
教程资讯排行









