can通信系统,汽车电子控制的核心桥梁
时间:2024-11-15 来源:网络 人气:
CAN通信系统:汽车电子控制的核心桥梁
随着汽车电子技术的飞速发展,CAN(Controller Area Network)通信系统已成为现代汽车电子控制系统的核心桥梁。本文将深入探讨CAN通信系统的原理、应用以及未来发展趋势。
一、CAN通信系统的起源与发展

CAN通信系统最早由德国Bosch公司于1983年提出,并于1986年正式成为国际标准ISO 11898。经过多年的发展,CAN通信系统已成为汽车电子控制系统中不可或缺的一部分。
二、CAN通信系统的原理与特点
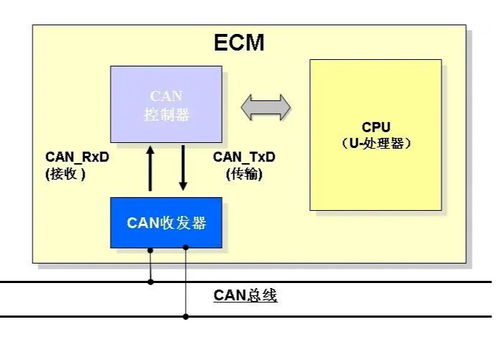
CAN通信系统采用多主从通信方式,允许多个节点同时发送和接收数据。其原理如下:
节点通过CAN总线发送数据帧,数据帧包含标识符、数据、校验和等字段。
CAN控制器对数据帧进行仲裁,确保优先级高的数据帧先传输。
接收节点对接收到的数据帧进行校验,确保数据正确无误。
CAN通信系统具有以下特点:
高可靠性:CAN通信系统具有强大的错误检测和纠正能力。
实时性:CAN通信系统支持高速数据传输,满足实时性要求。
灵活性:CAN通信系统支持多种数据帧格式,适用于不同应用场景。
三、CAN通信系统的应用领域
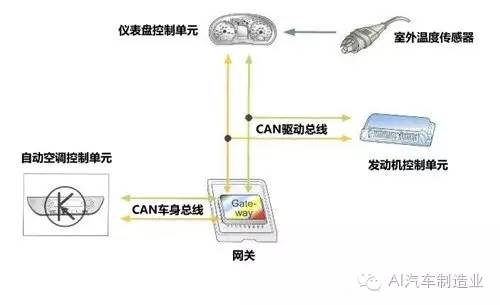
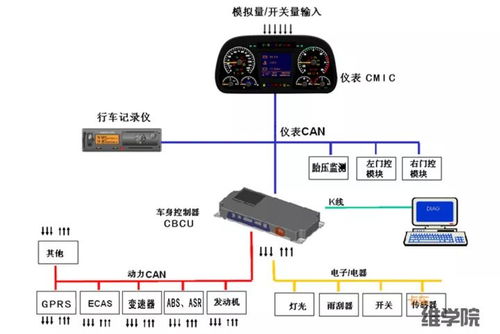
CAN通信系统广泛应用于汽车电子控制系统中,以下为其主要应用领域:
发动机控制单元(ECU):实现发动机点火、燃油喷射等控制。
车身电子控制单元:实现车门、车窗、座椅等控制。
底盘控制单元:实现ABS、ESP等安全系统控制。
信息娱乐系统:实现车载音响、导航等娱乐功能。
四、CAN通信系统的未来发展趋势
随着汽车电子技术的不断发展,CAN通信系统将呈现以下发展趋势:
更高传输速率:以满足更高数据量的传输需求。
更小尺寸:以适应更紧凑的汽车电子设计。
更强大的错误检测和纠正能力:以提高通信系统的可靠性。
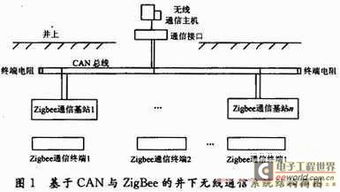
与其他通信协议的融合:如以太网、蓝牙等,实现更广泛的应用。
CAN通信系统作为汽车电子控制系统的核心桥梁,具有高可靠性、实时性和灵活性等特点。随着汽车电子技术的不断发展,CAN通信系统将在未来发挥更加重要的作用。
相关推荐




教程资讯
教程资讯排行